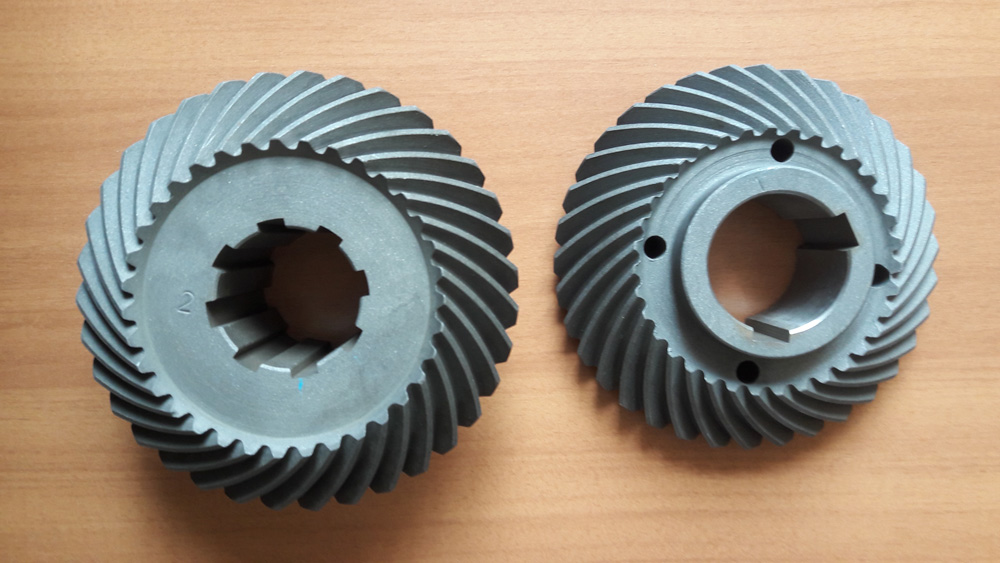
kartiohammaspyörät
puh/faksi: (831)282-01-65
puh: 8-(903)040-73-50
Nižni Novgorod, Kazanin moottoritie, 12 bldg. 1, of. 310
Erilaisia kartiohammaspyörät
Kartiohammaspyörät ovat hammaspyörien tiettyjä osia, joissa akselin akselit sijaitsevat tietyssä kulmassa. Useimmiten hammaspyörien akselien leikkauskulma on 90 astetta.
Kartiohammaspyörätyyppejä on useita, joiden välisen eron määrää hammaslinjan muoto. Esimerkiksi:
suorilla hampailla
pyöreällä hampaalla
tangentiaalisella hampaalla
involuuttisella hammaslinjalla
sykloidisella hammaslinjalla
Ja se on kaukana täydellinen luettelo kartiohammasvaihteiden tyypit.
Mutta eniten käytetyt tyypit ovat kartiohammaspyörät, joissa on suorat ja pyöreät hampaat. Spur-kartiohammaspyöriä käytetään vaihteissa, joilla on alhainen kehänopeus. Ne ovat erittäin herkkiä asetusten rikkomuksille. Asennusvirheet johtavat kontaktipaikan siirtymiseen hampaan päähän, lisääntyneeseen jännitykseen ja murtumiseen. Kartiohammaspyörien toimintaan liittyy lisääntynyt melu.
Nämä puutteet on jätetty pois kartiohammaspyörästä, jossa on pyöreä hammas.
Pyöreähammaskartiopyörän edut
Pyöreähampaiset kartiohammaspyörät ovat saaneet nimensä siitä, että hammaslinjan muoto on osa tietyn säteen omaavaa ympyrää. Toisin kuin kartiohammaspyörät, kosketus hammaspyöräparissa, jossa on pyöreä hammas, tapahtuu yhdessä pisteessä, joka siirtyy jatkuvasti hammaslinjaa pitkin. Tämä ominaisuus mahdollistaa sujuvan kytkennän ja vähentää melua käytön aikana. Pyöreähampaisilla hammaspyörillä on merkittävä kantavuus. Yllämainituista eduista johtuen pyöreitä hammaspyöriä käytetään tällä hetkellä laajalti koneenrakennuksessa. Lähes kaikissa autoissa niitä käytetään siirtämään vaihteistosta vetopyörille.
Kartiohammaspyörä, jossa on pyöreän hammastuksen haittoja
Huolimatta koko rivi kiistattomia etuja, pyöreällä hampaalla varustetuissa hammaspyörissä on edelleen haittoja. Johtuen siitä, että hammaspyörä toimii liukuvasti, sen hyötysuhde on jonkin verran pienempi kuin suorahampaisissa viistepareissa. Kosketuspisteen jatkuva liukuminen edellyttää myös erikoisvoiteluaineiden käyttöä naarmuuntumisen estämiseksi. Pyöreähampaisten hammaspyörien resurssit ovat jonkin verran pienempiä kuin hammaspyörien. Haittoihin kuuluu luultavasti myös tämän tyyppisten vaihteiden valmistuksen monimutkaisuus.
klo oikea toiminta hammaspyöräparit, joissa on pyöreä hammas, voivat toimia pitkään. Mutta valitettavasti ei ikuisesti. Siksi joskus on välttämätöntä vaihtaa ne. No, jos haluttu varuste on myynnissä. Mutta entä jos tämä on osa tuontiautoa ja sitä on mahdotonta löytää myytävänä?
Sitten jää ainoa vaihtoehto - tilata pyöreällä hampaalla varustetun kartiohammaspyörän valmistus erikoistuneessa yrityksessä. Tällainen yritys on tuotantoyhtiö "Konat"
Takaamme:
- minkä tahansa pyöreän hammaspyörän vaihteiston valmistustarkkuus
- lyhin tuotantoaika
- joustavat alennukset kanta-asiakkaille.
Soittaa puhelimella! Autamme aina mielellämme.
Saatavilla on valmiita kartiohammaspyöräpareja
pyöreällä hampaalla(m = 4 z = 35)
jyrsinkoneen 6A12P vaihteistoon
 |
 |
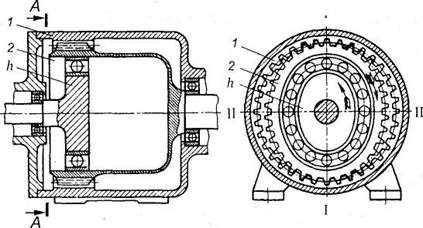
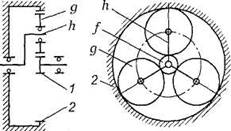
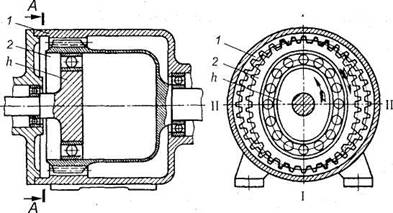
Kuva 15. planeettavaihteisto
Kantoaalto pyörii yhdessä satelliittien kanssakeskiakselin ympäri, ja satelliitit pyörivät keskipyörillä ja pyörivät akseliensa ympäri tehden liikkeet samankaltaisia kuin planeettojen liike. Kiinteällä pyörällä 2 liike välittyy pyörästä 1 kantajalleh tai päinvastoin.
Yksinkertaisin planeettavaihteisto sisältää yleensä yhden aurinkopyörän, yhden episyklin ja yhden planeettakannattimen. Tällaista planeettavaihteistoa kutsutaan yksinkertaiseksi planeettavaihteistoksi.
Yksinkertaisen planeettavaihteiston tärkein kinemaattinen ominaisuus on sen moninaisuusK= z 3 / z yksi ; missäz3 on episyklisten hampaiden lukumäärä; muttaz1- aurinkopyörän hampaiden lukumäärä. Planeettavaihteiden lukumäärän mukaan planeettavaihteet ovat yksi-, kaksois-, kolmi-, neli- ja monirivisiä. Venäläisessä kirjallisuudessa prof. V.N. Kudrjavtsev. Tämän luokituksen mukaan keskipyörien lukumäärä ilmaistaan numerolla ja kirjaimella.K, edelleen vaihteen merkinnässä viivan kautta kantajien lukumäärä ilmoitetaan, yhtä suuri kuin planeettavaihteiden lukumäärä ja kirjainH. Tämän luokituksen mukaan, joka on esitetty kuvassa. 15 kinemaattinen kaavio vastaa voimansiirtoa 2K-N.
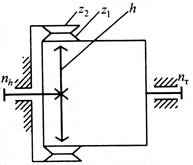
Planeettavaihteistolla, jossa yksikään lenkkeistä ei ole kytketty telineeseen, on kaksi vapausastetta, eli kaikkien sen nivelten liikkeen yksiselitteisen luonteen vuoksi se vaatii liikkeen syöttämistä ulkopuolelta kahteen näitä linkkejä. Tällaista mekanismia kutsutaan ero. Jos playksi lenkeistä on kytketty telineeseen (kerro sille vakio pyörimisnopeus, joka on 0 radiaania sekunnissa), tällainen mekanismi muuttuu voimansiirroksi. Differentiaalisen planeettavaihteistosarjan eri linkkien yhdistäminen hammastankoon (tai keskenään) johtaa planeettavaihteiston välityssuhteen muutokseen. Soveltamalla tätä tekniikkaa yksinkertaiseen planeettavaihteistoon, saat vähintään 7 vaihteistovaihtoehtoa eri välityssuhteilla, jotka on esitetty taulukossa 4.
Taulukko 8.1 Vaihteistovaihtoehdot
yksinkertaisen planeettavaihteen suhteet (kuva 15)
|
№ n/n |
No. syöttö |
lomanumero |
Ei kehitysvammainen |
vaihde |
|
H |
-K |
|||
|
H |
1+K |
|||
|
H |
-K-1 |
|||
|
H |
1+K-1 |
|||
|
H |
(1+K) -1 |
|||
|
H |
(1+K -1) -1 |
|||
|
H |
||||
|
Huomautus: Vaihtoehto 7 vastaa suoraa yhteyttä mekanismin tulo- ja lähtölinkit. |
||||
Taulukko 4 osoittaa, että vaihteistona käytetään yksinkertaista planeettavaihteistoa ajoneuvoa voit saada 5 erilaista nopeutta eteenpäin ja 2 - taaksepäin useilla nopeuden muutoksilla: eteenpäinK V =(1+K) 2, takaisinK V =K 2 .
Planeettavaihteita käytetään menestyksekkäästi kuljetustekniikassa, työstökoneiden valmistuksessa ja instrumenttien valmistuksessa.
Planeettavaihteiden edut ja haitat
Tärkein etu - laajat kinemaattiset mahdollisuudet, jotka mahdollistavat vaihteiston käytön vaihteistona, jonka välityssuhdetta muutetaan eri nivelten vuorotellen jarruttamalla, sekä tasausmekanismina.
Planeettaperiaatteen avulla voit saada suuret välityssuhteet (jopa tuhat tai enemmän) ilman monivaiheisia vaihteita.
Näitä lähetyksiä on kätevä koota käyttö- ja vetoakselien kohdistuksen vuoksi.
Nämä vaihteet ovat kompakteja ja kevyitä. Siirtyminen yksinkertaisista planeettavaihteista mahdollistaa monissa tapauksissa niiden massan vähentämisen kertoimella 4 tai enemmän.Tehoa siirretään useissa virroissa (3 satelliittia), kun taas hampaiden kuormitus vähenee. Lisäksi sisäisellä vaihteistolla on suurempi kantavuus (sillä on suurempi kaarevuussäde).
Planeettavaihteen satelliitit on järjestetty symmetrisesti, mikä vähentää tukien kuormitusta (voimansiirron voimat ovat keskenään tasapainossa), mikä johtaa häviöiden vähenemiseen ja yksinkertaistaa tukien suunnittelua.
Nämä vaihteet toimivat vähemmän melulla kuin perinteiset vaihteet, ja niissä on enemmän helppo ohjaus ja nopeuden säätö;
Niillä on alhainen melu mekanismin voimien sulkemisen vuoksi;
Omistaa korkea luotettavuus työskentely (suorituskyvyn ylläpitäminen jopa useiden hampaiden menettäessä keskipyöriä);
Niillä on korkea hyötysuhde suhteellisen suurilla välityssuhteilla;
Ei poikittaiskuormitusta pääakseleissa;
Mahdollisuus vaihtaa välityssuhdetta kytkemättä vaihteita pois päältä;
Mahdollisuus irrottaa moottorin akseli vaihteistosta, kun käytetään vaihteiston kytkimiä (vaihteisto toimii samanaikaisesti pääkytkimenä);
Nopea vaihtaminen, mikä lisää koneen keskimääräistä liikenopeutta.
Tärkeimmät haitat:
- lisääntyneet vaatimukset valmistuksen ja asennuksen tarkkuudelle (d Planeettavaihteiden kokoonpanon varmistamiseksi on tarpeen tarkkailla kohdistustilaa (pyörien geometristen keskipisteiden yhteensopivuus);
Kokoonpanotila (keskipyörien hampaiden summa on satelliittien lukumäärän kerrannainen) ja naapuruus (satelliittien hampaiden yläpinnat eivät kosketa toisiaan);
Voimansiirron tehokkuuden jyrkkä lasku välityssuhteen kasvaessa.
Pääsääntöisesti planeettavaihteistoille, joissa on episykliset pyörät, on korkeampi hyötysuhde verrattuna vaihteisiin, jotka koostuvat vain ulkoisista vaihteista. Tästä syystä planeettavaihteistoissa käytetään yksinkertaisimpia planeettavaihteistosarjoja, joissa on episykli. Vaihtojen määrä yhdellä rivillä ei yleensä ylitä kolmea kytkimen ja jarrujen ohjausjärjestelmän yksinkertaistamiseksi. Planeettavaihteiden määrä yhdessä vaihteistossa ei myöskään yleensä ylitä kolmea.
Planeettavaihteiden suunnittelun ja laskennan ominaisuudet liittyvät redundanttien kinemaattisten linkkien (useiden satelliittien) olemassaoloon. Suurin mahdollinen satelliittien määrä yhdessä planeettavaihteistossa on rajoitettu naapuruston kunto, jossa lukee: planeettavaihteistossa olevien satelliittien määrän on oltava sellainen, etteivät vierekkäiset satelliitit kosketa toisiaan. Planeettavaihteiston geometrian analyysi antaa meille mahdollisuuden kirjoittaa ylös mahdollisen satelliittien lukumäärän yläraja:
laskettaessa aurinkopyörästä (ulkoinen vaihteisto)-
![]()
episyklin mukaan laskettaessa (sisäinen vaihteisto)-
![]()
missä z1, z2, z3- aurinkopyörän, satelliitin ja episyklin hampaiden lukumäärä ja kulmat ilmaistaan radiaanimittana. Mutta koneenrakennuksen käytännössä satelliittien lukumäärä on harvoin yli kuusi, koska on vaikea varmistaa tasainen kuorman jakautuminen niiden välillä suurella määrällä niitä.
Toinen välttämätön ehto planeettasarjan olemassaololle on ns kohdistustila. Sen olemus johtuu tarpeesta ylläpitää keskipyörien, aurinkoenergian ja episyklin sekä kantajan kohdistus. Yksinkertaisessa planeettavaihteistossa tämä ehto johtaa aurinkopyörän ja satelliitin kytkeytymisen keskietäisyyksiina 1-2 ja satelliitin sitoutuminen episykliina 2-3. Koska hammaspyöriä käytetään pääasiassa planeettavaihteistosarjoissa, ja yksinkertaisessa rivissä kaikki saman moduulin pyörätm, voimme kirjoittaa
![]()
Vertaamalla yhtälöiden (8) oikeat puolet toisiinsa, saadaan
z1 + 2 z2 =z 3 ;(9)
sen jälkeen, kun yhtälön molemmat puolet on jaettu arvollaz1 meillä on
mikä antaa aurinkopyörän ja satelliitin väliselle välityssuhteelle
Mutta kuten tiedät, yksinkertaisen planeettavaihteistosarjan välityssuhde on maksimaalinen, kun käytetään aurinkopyörää ja vetoa
u 1-H = K+1; (12)
ja sellaista kinemaattista kaaviota varten meillä on
Kolmannen ehdon sanelee tarve sijoittaa satelliitit tasaisesti ympyrään aurinkopyörän ympärille, ja sitä kutsutaan ns. kokoonpanon kunto. Viime kädessä tämä ehto johtaa seuraavaan vaatimukseen: keskivaihteiden hampaiden lukumäärän suhteen satelliittien lukumäärään on oltava kokonaisluku tai kaavalauseke
missä int(lue "integraattori") - lyhenne, joka tarkoittaa mitä tahansa kokonaislukua.
tehovirran haarautuminen voimakuormien siirron aikana satelliittien kautta edellyttää erityistoimenpiteiden toteuttamista kuormien tasaisen jakautumisen varmistamiseksi satelliittien välillä. Satelliittien epätasaiseen kuormitukseen voi olla useita syitä: epätarkkuus hammaspyörien valmistuksessa, epätasainen keskietäisyys eri satelliittien välillä, satelliittien geometristen akselien kohdistusvirhe ( ei-rinnakkaisuus satelliittien ja päälähetysakselin akselit) jne. Jos kuormitus ei ole jakautunut tasaisesti satelliittien kesken, sen arvon välinen ero yksittäisten satelliittien välillä voi olla jopa 70 %.
Kuormituksen tasapainottaminen satelliittien välillä voidaan saavuttaa seuraavilla tavoilla:
1. parantaa kaikkien voimansiirron osien valmistustarkkuutta;
2. saatetaan yksi keskipyörästä tai teline kellumaan, eli jolla on jonkin verran säteittäistä liikkuvuutta suhteessa runkoon ja siihen liittyviin osiin;
3. joustavien rakenneosien käyttö (joustavuuden lisäntyneen jakson reuna, matalan jäykkyyden satelliittien akseli jne.).
Planeettavaihteiden lujuuslaskenta suoritetaan kaavojen mukaan sylinterimäiset vaihteet. Vaihteistoon vaikuttavaa laskennallista momenttia määritettäessä otetaan huomioon työkuormia välittävien satelliittien määrä ja niiden hampaiden epätasainen kuormitus. Jäykässä voimansiirrossa ilman erityisiä kuormituksen tasaustoimenpiteitä epätasaisuuskerroin sisällytetään laskentakaavoihinK H \u003d 1,5 ... 2, ja käytettäessä tekniikoita, jotka tasaavat satelliittien hampaiden kuormituksenK H \u003d 1,1 ... 1,15. Lisäksi laskenta suoritetaan eniten kuormitetun kytkennän mukaan.
Planeettavaihteen hyötysuhde voidaan laskea kaavoilla
vaihteistoon vetopyörällä-
siirtoon ajokannattimella-
missä i - planeettavaihteen välityssuhde, φ H - käänteisen lähetyksen kokonaishäviökerroin (lisäviestillä lasketusta kulmanopeudesta aiheutuva lähetys kaikille sen linkeille, joka on yhtä suuri kuin kantoaallon nopeus ja suunnattu sitä kohti).
puolestaan
missä φ P – häviöt laakerivaihteistoyksiköissä (laakeriparilleφ P = 5 ∙ 10 -3 …1 ∙ 10 -2); φ sn – vaihdeparin häviökerroin;φ gp = 6 ∙ 10 -3 …1 ∙ 10 -2 - kerroin ottaen huomioon voiteluaineen sekoituksen energiakustannukset.
Energiahäviö vaihteistossa
missä f sn– vaihdeparin kitkakerroin (ilman voiteluaf sn ≈ 0,2; voitelun kanssaf cp = 0,08…0,15); ε – kehän limityskerroinz1 Jaz2- mukana olevien pyörien hampaiden lukumäärä vaihdepari. Kaavassa (18) “+”-merkki tarkoittaa ulkoista sitoutumista, “-” sisäistä sitoutumista.
Planeettavaihteiden elementtien valmistukseen käytetään tavallisiin vaihteisiin tarkoitettuja materiaaleja, jotka ovat pääasiassa hiilitekniikkaa ja hiiliseosteräksiä, jotka on altistettu parannettavalle lämpökäsittelylle.
Kuten edellä mainittiin, planetaarisilla mekanismeilla on alkutilassa kaksi vapausastetta, ja tämä ominaisuus määräsi ennalta näiden mekanismien käytön eriyttävinä (summaavina) mekanismeina. Tasauspyörästötilassa toimivat kartiopyörillä varustettujen autojen tasauspyörästön planeettasummausmekanismit, planeettamekanismit tela-ajoneuvojen kääntämiseksi (säiliöt, tela-alustaiset traktorit jne.). Joten esimerkiksi monikäyttöisessä tela-ajoneuvossa BMP-3 kääntömekanismin toisena johtavana lenkkinä käytetään episykliä, joka mahdollistaa koneen kääntösäteen muuttamisen laajalla alueella muuttamatta sen nopeutta .
Planeettavaihteiden välityssuhde.
Määrittämistä varten välityssuhde planeettavaihteisto käyttää Willis-menetelmää - operaattorin pysäytysmenetelmä.
Planetaarinen välityssuhde (katso kuva 15)
missäJa- pyörien kulmanopeudet 1 Ja 2 suhteessa operaattoriinh z 1 jaz2 - näiden pyörien hampaiden lukumäärä.
Oikealle planeettavaihteelle (pyörä 2 kiinteä, pyörä 1 - johtaja, johtajah orja) klo=0 kaavasta (36) saadaan
tai
Yksirivisille planeettavaihteillei 1 h \u003d 1,258.0, monivaiheineni 1h = 301000 , kinemaattisille vaihteillei 1 h1600. Mitä suurempi planeettavaihteen välityssuhde on, sitä pienempi hyötysuhde (0,99 ... 0,1).
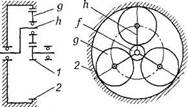
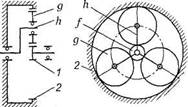
Laskettu kosketusvoimakkuus planeettapyörän hampaat suoritetaan analogisesti tavallisten vaihteiden laskemiseen kullekin vaihteelle erikseen (katso kuva 15): pyöräpari 1- g(ulkoinen vaihde) jag-2-(sisäinen). Tällaisille vaihteille riittää, että lasketaan vain ulkoinen vaihde, koska vaihteissa olevat moduulit ja voimat ovat samat ja sisäinen vaihde on vahvempi kuin ulkoinen.
Planeettavaihteiston suunnittelulaskenta aktiivisten pintojen kosketusväsymiselle hampaat suoritetaan seuraavan kaavan mukaan:
missäd 1 - etulenkin (vaihteen) halkaisija, mm;Kd = 78 MPa - apukerroin (teräksiset kannuspyörät otetaan huomioon);T 2 - vaihteen vääntömomentti, Nmm;- kuormituskerroin;- kerroin, jossa otetaan huomioon kuorman epätasainen jakautuminen satelliittien kesken;i 1-2 - välityssuhde;\u003d 0,75 - hampaan pituuskerroin (pyörän leveys);- sallittu kosketusjännitys, MPa.
Planeettavaihteita laskettaessa pyörien hampaiden lukumäärän valinta ei riipu vain välityssuhteestai , mutta myös ehdoista kerättävyys vaihteet. Tässä tapauksessa keskipyörien hampaiden summan on oltava satelliittien lukumäärän kerrannainen (mieluiten 3).
aaltovaihteet . Laite voimansiirto- ja lujuuslaskenta
Aalto mekaanisia voimansiirtoja kutsutaan mekaanisiksi voimansiirtoiksi, jotka sisältävät joustavia ja jäykkiä lenkkejä, jotka ovat kosketuksissa toisiinsa ja tarjoavat liikkeen siirron ja muunnoksen joustavan lenkin liikkuvan aallon muodonmuutoksen avulla.
Tekniikassa käytetään usean tyyppisiä aaltolähetyksiä:
1. ruuvi aaltolähetykset, jotka on suunniteltu muuttamaan pyörivä liike translaatioksi ja/tai siirtämään tämä liike sinetöity tilaa;
2. kitkainen aaltolähetyksiä, jotka on suunniteltu muuttamaan (useimmiten voimakasta vähennystä) pyörivää liikettä ja/tai siirtämään tämä liike sinetöity tilaa;
3. rosoinen aaltolähetyksiä, joilla on samanlainen tarkoitus kuin kitkalähetyksillä, mutta jotka kykenevät välittämään huomattavasti suurempia tehoja.
Insinööri A.I. ehdotti periaatetta aaltomuodonmuutoksen käyttämisestä liikkeen siirtämiseen ja muuntamiseen. Moskvitin vuonna 1944 kitkasiirtoon sähkömagneettisen aallon generaattorilla, ja vuonna 1959 Walton Masserille myönnettiin US-patentti (WaltonMusser) vaihteistoon, jossa on mekaaninen aaltogeneraattori. Jatkossa voimansiirroissa käytettiin pääasiassa vaihteistoaaltosiirtoja, joita tarkastellaan tässä osiossa.
Pyörimisliikkeen aaltomekanismia, sopivalla rakenteella, voidaan käyttää alennusvaihteena, kertoimena tai tasausmekanismina. Yleisimmin käytetyt vaihteiston aallonvaimentimet. Kinemaattisesti aallonvälitys voidaan katsoa planeettavaihteiden ryhmään kuuluvaksi, toisin sanoen aallonsiirtoa tulisi pitää planeettavaihteena, jossa yksi keskeisistä pyöristä on tehty joustavan hammaspyörän muodossa. Kuvassa Kuvassa 16 on esitetty aallonsiirron pääelementit: kiinteä pyörä 1 sisähampaineen, pyörivä elastinen pyörä 2 ulkoisilla hampailla ja kannakkeella (aaltogeneraattori)h .Kiinteä pyörä on kiinnitetty koteloon ja on valmistettu perinteisen pyörän muodossa Hammaspyörä sisäisellä sitoutumisella. Joustava hammaspyörä on lasin muotoinen, jossa on helposti muotoutuva ohut seinämä: paksunnetussa osassa (vasemmalla) leikataan hampaat, oikealla akselin muotoinen. Teline koostuu soikeasta nokasta ja erikoislaakerista.
Riisi. 16. Aallonsiirto
Joustava pyörä on vääntynyt siten, että ovaalin akselia pitkinminä-minä hampaat kiinnittyvät täyteen työkorkeuteen; akselia pitkinII -II hampaat eivät tartu.
Liikkeen välitys tapahtuu joustavan pyörän hammaspyörän muodonmuutoksen vuoksi. Kun alusta pyörii, muodonmuutosaalto kulkee joustavan rengaspyörän kehää pitkin; tässä tapauksessa kruunu pyörii kiinteällä jäykällä pyörällä vastakkaiseen suuntaan pyörittämällä lasia ja akselia. Siksi lähetystä kutsutaan aalloksi ja kantoaaltoa aaltogeneraattoriksi.
Pyöriessään muodostuu soikeita kantajia kaksi aaltoa. Tällaista lähetystä kutsutaan kaksiaaltoiseksi. On kolmiaaltolähetyksiä, kuvassa 1. Kuvio 17 esittää kaavion tällaisesta lähetyksestä. H niillä on suurempi taipuisan pyörän taivutusjännitys.
Riisi. 17. Kolmiaaltolähetys
Kuva 18. Aallonläpäisyn merkintä kinemaattisissa kaavioissa
Koska aallonsiirron välityssuhde ei riipu joustavan pyörän muodonmuutosaaltojen lukumäärästä ja aaltojen määrän lisääntyminen lisää taivutusjännitystä joustavan pyörän rungossa, symmetrinen kaksiaalto Useimmiten käytetään joustavan pyörän muodonmuutoskaaviota, mikä mahdollistaa vaihteiston akseleiden poikittaiskuormituksen mahdollisuuden.
Useimmissa tunnetuissa malleissa joustava pyörä on varustettu ulkoisella hammaspyörällä ja jäykkä pyörä on varustettu sisähampailla (kuva 16). Tällainen aaltosiirto sisältää 3 päälinkkiä: joustava 1 ja kovaa 2 pyörät ja aaltogeneraattoriH. Yleensä on kätevintä yhdistää rakenteellisesti vaihteiston tuloakseli aaltogeneraattoriin ja lähtöakseli joustavalla pyörällä; tässä suoritusmuodossa vaihteiston suunnittelu on kompaktein ja teknisesti edistynein. Siirrettäessä pyörimisliikettä tiivistetyn seinän läpi, on kuitenkin kätevämpää tehdä joustava pyörä paikallaan ja kytkeä ulostuloakseli jäykkään pyörään.
Tehonrajoittimien taipuisat pyörät on valmistettu seostetuista korkealujista teräksistä 30KhGSA; 30HGSN2A; 40XHMA; 50С2 ja jotkut muut lämpökäsittelyllä 38…45 astiHRC ja sitä seuraava halkaisijan hionta, laskeutuminen aaltogeneraattorin laakeriin. Muiden osien valmistukseen käytetään samoja materiaaleja kuin tavallisissa vaihteissa.
Aaltolähetyksen edut ja haitat
Aaltolähetyksen edut:
1. suuri välityssuhde (jopa 320 ja joissakin tapauksissa enemmän);
2. suuri määrä hampaita samanaikaisesti kytkettynä (yleensä 40 - 80 %) ja sen seurauksena suuri kantavuus - massa aallonvähentäjä pienempi kuin saman tehoisen planeetan massa, ja tilavuus voi olla noin 30 % jälkimmäisen tilavuudesta;
3. korkea kinemaattinen tarkkuus monivyöhykkeen ja usean parin kytkennän ansiosta, kinemaattinen lähetysvirhe joissakin tapauksissa ei ylitä 0,5 minuuttia;
4. korkea hyötysuhde, jossa suuret välityssuhteet ylittävät planeettavaihteiden tehokkuuden;
5. akseleiden poikittaiskuormituksen puuttuminen rakenteen symmetriasta johtuen;
6. mahdollisuus siirtää liike suljettuun tilaan;
7. hiljainen;
8. suuri tärinälujuus johtuen värähtelyjen vaimennuksesta (energiahäviöstä) (4-5 kertaa enemmän kuin tavanomaisessa vaihteessa);
9. mahdollisuus käyttää differentiaalimekanismina;
10. pieni määrä osia ja suhteellisen alhaiset kustannukset;
11. suuri kantavuus massayksikköä kohti (3 ... 4 kertaa suurempi kuin hammaspyörien);
13. kytkennän luotettavuus ja pienet mitat (moniparikytkennässä hampaiden rikkoutuminen ei vaikuta suorituskykyyn ja voimansiirron tarkkuuteen);
14. korkea valmistettavuus.
Aaltovaihteiden haitat:
1. mahdottomuus saavuttaa alhaisia välityssuhteita (joustaville teräspyörille u min ≈ 80, muoville - u min ≈ 20);
2. erikoistyökalujen ja -laitteiden tarve joustavan pyörän valmistukseen, mikä vaikeuttaa hammaspyörien yksilöllistä valmistusta ja korjausta;
3. mahdollisuus käyttää näitä vaihteita vain suhteellisen pienellä generaattorin akselin kulmanopeudella;
4. käyttöakselin rajoitetut kierrokset (ei-pyöreän aaltogeneraattorin suurten keskipakohitausvoimien välttämiseksi;
5. hienohammasmoduulit0,15-2 mm;
6 . aaltogeneraattorin suunnittelun monimutkaisuus;
7. alhainen hyötysuhde (in voimansiirto η≈ 0,75…0,9);
8. lisääntyneet vaatimukset joustavan pyörän valmistukseen käytettävälle materiaalille (jatkuvan ja merkittävän muodonmuutoksen vuoksi);
9. koskevat matala aikaväli käyttöikä (tavallisten aallonvähennysten käyttöikä on noin 10 4 tuntia - hieman yli vuosi jatkuvaa käyttöä).
Huomatuista puutteista huolimatta aaltolähetyksiä käytetään yhä enemmän tekniikassa ja ennen kaikkea lentokoneissa, kuukulkijoissa, ydinreaktoreissa, tarkkuusinstrumenteissa ja teollisuusroboteissa. Aallonsiirrot (kiinteällä joustavalla pyörällä) välittävät pyörimisen tiiviiseen tilaan läpäisemättömän seinän läpi ilman tiivisteitä tai erityisiä kalvoja. Tämä mahdollistaa vaihteiston käytön lentokoneissa ja eristetyissä kemiallisesti aggressiivisissa ympäristöissä. Suuren moniparisen kytkennän ansiosta (samaan aikaan 25 ... 30 % joustavan pyörän hampaista on kytkettynä 1 ) aallonläpäisy voi parantaa merkittävästi kytkennän sujuvuutta, kantokykyä ja kinemaattista tarkkuutta. Siksi aaltolähetyksiä on viime aikoina käytetty teollisissa robottikäytöissä.
Aaltovaihteet voivat toimia vähentäjänä (hyötysuhde 80 - 90 %) ja kertojana (hyötysuhde 60 - 70 %) . Ensimmäisessä tapauksessa aaltogeneraattori on johtava lenkki, toisessa joustavan tai jäykän pyörän akseli.
Aaltovaihteiden välityssuhde
Epämuodostuneessa tilassa aallonvähentäjän taipuisalla pyörällä on halkaisija ja hampaiden lukumäärä pienempiä kuin jäykällä pyörällä. Kun aaltogeneraattori muuttaa muotoaan, joustava pyörä venyy generaattorin nokan pitkän akselin suuntaan siten, että sen hampaat joutuvat kosketuksiin jäykän pyörän hampaiden kanssa; samalla joustava pyörä puristuu lyhyen pyörän mukaan. generaattorin nokan akselilla, ja sen hampaat tässä suunnassa eivät voi olla vuorovaikutuksessa jäykkien pyörien hampaiden kanssa. Kun aaltogeneraattorin nokka pyörii, ne kulkevat joustavan pyörän hammaspyörän kehää pitkin pakottaen siten osan hampaista joko kytkeytymään jäykän pyörän hampaisiin tai poistumaan siitä. Jos taipuisa pyörä kulkee jäykällä luistamatta, niin generaattorin yhdellä kierroksella vetolenkki kääntyy kulman, joka vastaa jäykkien ja taipuisten pyörien kosketuspintojen kehän eroa, joten välityssuhde on yhtä suuri kuin vetolenkin kehän suhde pyörien ympärysmittojen eroon.
Aaltovaihteiden välityssuhde päättänyt operaattorin pysäytysmenetelmä (Willis-menetelmä).
Kiinteällä jäykällä pyörällä aallonvälityksen välityssuhde määräytyy lausekkeen mukaan.
Miinusmerkki ilmaisee ajo- ja vetolenkkien eri pyörimissuunnat.
Kiinteällä joustavalla pyörällä:
missä: n 0, n 1, n 2- veto- ja vetonivelten pyörimistaajuus;
z1,z2- taipuisten ja jäykkien pyörien hampaiden lukumäärä.
Jäykkien ja taipuisten pyörien hampaiden eron tulee olla yhtä suuri tai kerrannainen aaltojen lukumäärällä, eli:
z 1 - z 2 = R z,
missä: RZ- kerroinkerroin, yleensä yhtä suuri kuin 1,0, mutta kanssaU< 70 RZ=2, kunU<45 RZ= 3.
Vaaditun suurimman säteittäisen siirtymän ω 0 sivuvälin puuttuessa (jos hammaspyörän vanteet leikataan ilman generoivan ääriviivan siirtymistä) tulee olla yhtä suuri kuin alkuympyröiden halkaisijoiden eron puolikas:
nω 0 = 0,5 (d W1- d W2) = 0,5ω (z 2 - z 1) = 0,5 ω R z U.
Jäykkien ja taipuisten pyörien hampaiden lukumäärän eron on oltava verrannollinen aaltogeneraattorin aaltojen lukumäärään, jotta hampaiden häiriöt vältetään.
Aaltolähetysten tehokkuus on suhteellisen korkea ja, kuten planeettalähetyksissä, laskee välityssuhteen kasvaessa, ja kuormituksen kasvaessa se ensin kasvaa maksimaaliseen mahdolliseen arvoon ja sitten, kun kuormitusta edelleen kasvaa, se alkaa laskea jyrkästi. Optimaalisella kuormituksella välityssuhteessa 80≤ u ≤ 250 hyötysuhde 0,9≥ h≥ 0,8.
Joskus käytetään kinemaattisena aaltosiirtona, jossa on kaksi hammaspyörän vannetta joustavalla kuorella, mikä vastaa planeettavaihteistoa, jossa on kaksi sisäistä vaihdetta. Tällaisen vaihteiston hyötysuhde on alhainen - 5%, ja välityssuhde on suuriU = 3600 - 9000.
Vian syyt ja aaltolähetysten suorituskykykriteerit
Kokeelliset tutkimukset osoittavat, että aaltolähetykset eivät toimi seuraavista syistä:
1. Aaltogeneraattorin laakerien vaurioituminen kuormituksen vaikutuksesta tai merkittävästä lämpötilan noususta. Lämpötilan nousu voi aiheuttaa aaltogeneraattorin ja joustavan hammaspyörän välisen raon ei-hyväksyttävän pienenemisen, mikä puolestaan voi johtaa aaltogeneraattorin alkuperäisen muodon, joustavien ja jäykkien hammaspyörien vanteiden ei-hyväksyttävään muutokseen.
2. Aaltogeneraattorin ylitys suurilla vääntömomenteilla (analogisesti turvakytkimen kanssa). Tämä ilmiö tapahtuu, kun hampaat kytkennän sisäänkäynnissä lepäävät toisiaan vasten kärkien pintojen kanssa. Tässä tapauksessa aaltogeneraattori puristetaan kokoon ja jäykkä pyörä laajenee säteen suunnassa. Liukumisen estämiseksi säteittäinen elastinen siirtymä on suunniteltu enemmän kuin nimellinen, ja kytkentä kootaan häiriösovituksella.
3. Joustavan pyörän murtuminen väsymishalkeamista, joita esiintyy rengashammaspyörän kouruissa, varsinkin kunu < 80. С увеличением толщины гибкого колеса напряжения в нем от полезного передаваемого момента уменьшаются, а от деформирования генератора волн уменьшаются. Поэтому есть оптимальная толщина.
4. Hampaiden kuluminen päissä;
5. Hampaiden sivupintojen plastinen muodonmuutos ylikuormituksen aikana.
Aaltolähetysten epäonnistumisen syiden analyysi osoittaa, että milloini > 120 kantavuutta rajoittaa yleensä aaltogeneraattorin laakerin käyttöikäi ≤ 100 - joustavan elementin lujuus. Suurin sallittu vääntömomentti liittyy nivelten yhteensopivuuteen
Pääasiallinen syy aallonsiirtojen epäonnistumiseen on aaltogeneraattorin taipuisan pyörän ja taipuisten laakerirenkaiden rikkoutuminen, joka johtuu väsymisvauriosta vaihtuvien taivutusjännitysten vaikutuksesta. Siksi voimansiirron mitat määräytyvät taipuisan pyörän ja aaltogeneraattorin laakerin ulkorenkaan taivutuskestävyysrajan perusteella.
Suunnittelulaskelma määritetään sisähalkaisija joustava pyörän kaava
missä T1- vääntömomentti joustavan pyörän akselissa, N ∙ m; [σ ] - sallitut jännitykset, MPa (teräkselle 30KhGSA [𝜎 ]=150…170 MPa); E on pyörän materiaalin kimmomoduuli (teräksille voit ottaa E= 2,1∙ 105 MPa) ψ bd = b 1 /d=0,15…0,20 on hammaspyörän vanteen leveyskerroin; ψ SD = S 1 /d= 0,012…0,014 – hammaspyörän vanteen paksuuskerroin.
Nokka-aaltogeneraattoria käytettäessä laskettu halkaisija pyöristetään ylöspäin lähimpään joustavan laakerin ulkohalkaisijaan. Lisäksi määritetään loput parametrit vaihteisto samankaltaisten kaavojen mukaan kuin lieriömäisten hammaspyörien kaavoissa.
Laskettu taipuisa pyörä: a) tarkistetaan taivutusjännitysten suhteen, jotka muuttuvat symmetrisessä syklissä pyörän muodonmuutosprosessissa aaltogeneraattorilla; b) hammasvanteen vetojännitysten mukaan, jotka syntyvät tangentiaalisten voimien vaikutuksesta pyörään ja muuttuvat nollajakson mukaan, sekä hammasvanteen vääntöjännitysten mukaan, jotka syntyvät, kun taipuisa pyörä siirtää vääntömomenttia ulostuloakselille ja muuttuvat nollajakson mukaan.
Kysymyksiä itsetutkiskelua varten
Mitä etuja pyöreähampaisilla kartiohammasvaihteilla on hammaspyöriin verrattuna?
Mitä menetelmiä käytetään kartiohammaspyörien laskemiseen?
Mitä eroa on kääntö- ja pyöreän kartiohammaspyörän voimien suunnalla?
Mitkä ovat vastaavia ja biekvivalentti hammaspyörät?
Miksi pyöreähampaisia kartiohampaita pidetään teknisesti edistyneempinä kuin hammaspyörät?
Missä tapauksissa ovat kartiomaisia vaihteet?
Mitä etuja kierrevaihteilla on hammaspyöriin verrattuna?
Miten se vaikuttaa työhön kierrevaihteisto muuttaa hampaiden kulmaa? Suositeltavat arvot näille kulmille. Miksi rajoittaa hampaan kaltevuuskulman maksimiarvoa?
Mitkä kytkentämoduulit erotetaan kierrevaihteista ja mikä on niiden välinen suhde? Mikä moduuli on standardoitu?
Mistä tekijöistä kierrevaihteen kehä- ja aksiaalivoimien suunnat riippuvat?
Mitä asetuksia muuttaa hammaspyörät vaikuttaako heidän kontaktivoimakkuuteensa?
Missä tapauksissa chevron-vaihteita käytetään ja mitä etuja niillä on kierrevaihteisiin verrattuna? Mitkä ovat chevron-vaihteiden haitat?
Mitä etuja pyöreähampaisilla kartiohammasvaihteilla on hammaspyöriin verrattuna?
Onko kytkentämoduuli vakio kartiovaihteissa?
Mitä hampaan osaa käytetään taivutuksen laskemiseen viisteiset pyörät? Mikä moduuli luonnehtii tämän osan mittoja?
Miten kartiohammaspyörien kytkeytymisessä vaikuttavat aksiaalivoimat suunnataan?
Mitä tarkoittaa vastaava sylinterimäinen pyörä? Kuinka vastaava hampaiden lukumäärä lasketaan kartiohammaspyörille ja kierrehammaspyörille?
Mikä on hammastushammasten vähimmäismäärä kanto- ja kartiohammaspyörässä?
Mitkä ovat planeettavaihteiden edut ja haitat?
Miksi aaltolähetyksiä luodaan ja mikä on niiden työn periaate?
Mitkä ovat aaltolähetyksen edut ja haitat?
Miten aallonsiirrot eroavat planeetan lähetyksistä?
Mikä määrittää aaltolähetysten välityssuhteen?
Missä tapauksessa aallonsiirron tulo- ja lähtöakselit pyörivät eri suuntiin?
Mikä pyörä pyörii, kun se siirtää pyörimisen tiivistetyn seinän läpi?
Mikä on joustava laakeri?
Mikä osa aallonsiirrosta on haavoittuvin?
Minkä muotoisia aaltopyörien hampaat ovat?
Mikä on aallonsiirron laite ja toimintaperiaate?
Mistä parametreista aallonläpäisyn välityssuhde riippuu ja mitkä ovat sen max ja min rajat?
Mitkä ovat liikkeen muuntamisen piirteet hammaspyörien ja kitkaaaltojen lähetyksessä?
Mitkä ovat hampaiden profiilin ja mittojen valinnan ehdot aallonsiirrossa?
Mitkä ovat tärkeimmät kriteerit aaltolähetysten suorituskyvylle ja laskemiselle?
Mitkä ovat aaltolähetysten ja niiden sovellusten edut ja haitat?
Miten aaltovaihteisto toimii ja miten se toimii? Mitkä ovat voimansiirron pääelementit?
Mitkä ovat aaltolähetyksen tärkeimmät edut ja haitat muihin lähetyksiin verrattuna?
Miten joustavalle pyörälle annetaan soikea muoto? Miten liikkeen siirto tapahtuu aallonvälityksessä johtavasta linkistä ajettuun?
Mitä eroa on jäykkien ja taipuisten aallonsiirtopyörien hampaiden lukumäärällä? Mitä hammasprofiilia käytetään?
Miten aallonsiirron välityssuhde lasketaan?
Miksi nokkageneraattorin laakeria kutsutaan joustavaksi?
Miksi aaltolähetyksiä käytetään laitteissa, joilla on korkeat vaatimukset kinemaattiselle tarkkuudelle tai tiiviydelle?
Vertaa aaltovaihteita tavanomaisiin vaihteisiin hampaiden päällekkäisyyden suhteen.
Vaikuttaako aaltogeneraattorin valmistusosien tarkkuus aallonsiirron suorituskykyyn?
Miksi Novikov-vaihteet luodaan ja mikä on niiden hampaiden suunnitteluperiaate?
Mitkä ovat Novikov-linkkien edut ja haitat?
Mitkä ovat Novikov-vaihteen edut ja haitat ja verrata sitä kierteiseen vaihteeseen?
Planeettavaihteet - laite ja kinematiikka, arviointi ja sovellus?
Planeettavaihteiston vaihteiston voimat ja lujuuslaskelman ominaisuudet?
Mitkä ovat planeettapyörän hampaiden lukumäärän valinnan ehdot?
Mitä vaihdetta kutsutaan planetaariseksi? Sen laite ja toimintaperiaate?
Milloin planeettavaihteistoa kutsutaan tasauspyörästöksi?
Mitkä ovat planeettavaihteiden tärkeimmät edut ja haitat verrattuna perinteisiin vaihteisiin?
Millä koneenrakennuksen aloilla planeettavaihteita käytetään laajalti ja miksi?
Mitä menetelmää käytetään, kun johdetaan kaava planeettavaihteen välityssuhteen määrittämiseksi?
Mitkä ovat planeettavaihteiden suuntauksen, kokoonpanon ja läheisyyden ehdot? Miksi planeettavaihteiden laskeminen alkaa hampaiden lukumäärän valinnasta?
Millä nopeudella kehänopeus lasketaan lähetystarkkuuden ja kertoimien valinnan määrittämiseksi K H υ Ja K F υ?
Mitä kerroin Y A ottaa huomioon kaavassa, jolla määritetään satelliittihampaiden sallitut taivutusjännitykset?
Miksi keskusvaihde kelluu planeettavaihteistossa?
Mitkä ovat erityyppisten planeettavaihteiden ominaisuudet?
Miksi planeettavaihteiden hyötysuhde kasvaa, kun välityssuhde pyrkii yhtenäisyyteen?
Millä planeettavaihteista on suurin välityssuhde?
Mikä on itsesuuntautuvien planeettahammaspyörien tarkoitus?
Mikä on tasauspyörästö ja mitkä ovat sen ominaisuudet?
Mitkä planeettapyörän laakerit ovat eniten kuormitettuja ja miksi?
Mikä planeettavaihteiston parametri määritetään suunnittelulaskelmassa? Mitä välityssuhdetta tähän käytetään?
Mitkä ovat planeettavaihteiden kokoonpanon ehdot?
Kuinka monta tarkkuusastetta vaihteet ovat ja mikä on niiden riippuvuus kehänopeuksista?
Mikä on vaihdemuutos?
Millaisia modifikaatioita kääntö- ja kartiovaihteissa käytetään?
Mitkä ovat hammaspyörien ja kartiohammaspyörien materiaalit ja lämpökäsittelyt?
Mitkä ovat kartiohammaspyörien valmistusmenetelmät?
Suurin rakentava ero Novikov-hampaan ja tunnettujen hampaiden välillä.
Luettele Novikov-vaihteistolla varustettujen vaihteiden haitat ja tärkeimmät edut.
Muista sylinterimäisen kierrehammaspyörän kosketuslujuuden laskentakaavat.
Mitä hammasprofiileja voidaan soveltaa planeettavaihteisiin?
Listaa esimerkkejä planeettavaihteiden mahdollisista sovelluksista.
Selitä miksi planeettavaihteelle (ks. kuva) riittää vain ulkoisen vaihteen laskeminen?
Kartiovaihteet, niiden arviointi verrattuna lieriömäinen? Käyttöalueet? Kartiovaihteen tärkeimmät geometriset parametrit?
Voimia kääntökulmapyörän kytkemisessä?
Kartiovaihteen tuominen vastaavaan sylinterimäiseen hammaspyörään (vastaavat parametrit d v ja zv)?
Mitä eroa on σ H:n ja σ F:n laskentakaavojen välillä kartiovaihteissa verrattuna lieriömäinen ja miksi?
Millaisia epäsuoria hampaita käytetään kartiohammaspyörissä ja miten niiden edut arvioidaan σ H:n ja σ F:n lasketuissa riippuvuuksissa?
Millä kriteereillä välityssuhde jakautuu monivaiheisen voimansiirron vaiheille?
Mitkä häviöt määräävät vaihteiston hyötysuhteen ja mikä on sen likimääräinen arvo?
Mitä materiaaleja ja lämpökäsittelytyyppejä käytetään vaihteiden lujuuden ja kestävyyden lisäämiseen?
Mitkä materiaalin ominaisuudet pääasiallisesti määräävät kosketusväsymisen kestävyyden ja sallitut kosketusjännitykset?
Miten kuormitustavan vaihtelu otetaan huomioon sallittuja jännityksiä määritettäessä?
Miten vahinkojen summausehto kirjoitetaan ja miten se selitetään?
Mitkä ovat tyypilliset lastausolosuhteet?
Mitkä ovat parametrit vaihteiden suunnittelun optimoimiseksi? Mitä pidetään yleisenä optimointikriteerinä?
Mitä hammaspyörä- ja kartiohammaspyöristä käytetään pyörityksen välittämiseen akselien välillä, joiden akselit ovat ristissä?
Päävaihteet on lueteltu alla:
a) lieriömäinen suoralla hampaalla;
b) lieriömäinen, jossa on vino hammas;
c) lieriömäinen ja chevron-hammas;
d) kartiomainen, jossa on suora hammas;
e) kartiomainen, jossa on vino hammas;
f) kartiomainen, jossa on pyöreä hammas;
g) sylinterimäinen pyörä ja kisko.
Kuinka monella niistä voidaan siirtää kiertoa risteävien akselien välillä?
1. Yksi.
2. Kaksi.
3. Kolme.
4. Neljä.
Vaihteiden vertaaminen muihin mekaaniset vaihteet, Huomautus:
a) hampaiden valmistuksen ja valvonnan monimutkaisuus;
b) liukumisen mahdottomuus;
c) korkea hyötysuhde;
d) pienet mitat;
e) melu käytön aikana;
f) suurempi kestävyys ja luotettavuus;
g) käyttömahdollisuus laajalla vääntömomenttien, nopeuksien ja välityssuhteiden alueella.
Kuinka monta seuraavista ominaisuuksista voidaan luokitella positiivisiksi?
1. Kolme.
2. Neljä.
3. Viisi.
4. Kuusi.
Jotta vaihteet kytkeytyvät, minkä niiden on oltava samat?
1. Halkaisijat.
2. Leveys.
3. Hampaiden lukumäärä.
4. Vaihe.
Mekanismissa on useita peräkkäisiä vaihteita; kun käyttöakseli pyörii nopeudella 1000 rpm, vetoakseli pyörii nopeudella 80 rpm. Mikä on tämän mekanismin oikea nimi?
1. Vaihdelaatikko;
2. Variaattori;
3. Kerroin;
4. Supistin.
Millä periaatteella keskipisteetäisyyksien, välityssuhteiden ja hampaiden leveyskertoimen standardiarvojen sarjat on rakennettu?
1. Sarja tarkoituksenmukaisia lukuja.
2. Aritmeettinen progressio.
3. Geometrinen eteneminen.
4. Logaritminen sarja.
Kartiohammaspyörän jakoympyrän halkaisija, jos keskimääräinen moduuli m = 3 mm, hampaiden lukumäärä z = 20, jakokartion kulma = 45° ja kruunun leveys b = 10 mm, on yhtä suuri. vastaanottajalle:
Kartiovaihteiden voimansiirtojen ominaisuudet verrattuna sylinterimäisiin vaihteisiin on huomioitu:
1. vaikeampi valmistaa ja asentaa;
2. toimivat vähemmällä melulla;
3. epätasainen kuormituksen jakautuminen hampaan pituudella on suurempi, koska yksi pyöristä on sijoitettu akselikonsoliin;
4. mahdollistaa pyörimisen siirtämisen risteävien akselien välillä.
Mikä ominaisuus on väärä?
Mikä kaavoista pienentävän kartiohammaspyörän välityssuhteen määrittämiseksi on kirjoitettu väärin?
2) 75°;
3) 90°;
4) 120°.
Mikä on kartiohammaspyörän hampaiden muoto?
1. Suora.
3. Pyöreä ja kaareva.
4. Chevron.
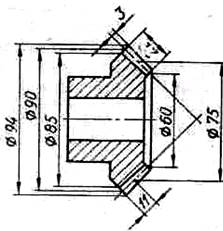
Kuvassa on kartiohammaspyörä ja hampaiden lukumäärä z=30. Mikä on sen moduuli?
1. m= 3 mm,
2. m= 2,5 mm.
3. m= 2 mm.
4. m= 1,5 mm.
Kuvassa on tavallinen kartiohammaspyörä. Kuinka monta hammasta hänellä on?
Kääntökulmavaihteen pääparametrit on lueteltu alla:
1. moduuli ( m);
2. hampaiden määrä ( z);
3. kartioetäisyys (R e);
4. alkukartion puolikulma (δ );
5. halkaisija ( d 2);
6. hampaan leveys ( b);
7. hampaan profiilikulma .
Kuinka monta niistä pitäisi määrittää vakionumerosarjoista?
1. Kaksi.
2. Kolme.
3. Neljä.
4. Viisi.
Mikä suorituskykykriteeri on todennäköisin hammaspyörille, joissa on kartiohammaspyörät hammaspyöräversiossa?
1. Hampaiden taivutusväsymyslujuus.
2. Hampaiden staattinen taivutuslujuus.
3. Hampaiden kosketusväsymislujuus.
4. Hampaiden staattinen kosketuslujuus.
Kuinka monta lueteltua parametria tulisi antaa tai määrittää alustavilla laskelmilla, jotta suljetun kartiohammaspyörän lujuusanalyysi voidaan tehdä?
1. Hampaiden lukumäärä ( z 1, z 2).
2. Välityssuhde ( u).
3. Nopeus (P 1 , n 2).
4. Parin hammaspyörien materiaalit.
5. Moduuli ( m).
6. Hampaiden kulma ( ).
7. Hampaiden leveystekijä ( ).
8. Lähetetty teho (R).
Kuinka he käyttävät samanlaisia kaavoja hammaspyörien laskemiseen hammaspyörien kanssa kartiohammaspyörillä olevien hammaspyörien laskemiseen?
1. Hyväksy nimelliskuorma.
2. Yliarvioi kuormitus.
3. Aliarvioi kuormitus.
4. Yli- tai aliarvioi erityisistä käyttöolosuhteista riippuen.
Mikä vakiomoduuli on määritetty pyöreähampaisille hammaspyörille?
1. loppu jaon halkaisijalla.
2. Normaali keskimääräinen halkaisija.
3. loppu pienimmällä jakokartion halkaisijalla.
4. loppu keskimääräinen halkaisija.
Minkä suunnan voima syntyy kartiohammaspyörien yhteenliittämisessä?
1. Kehämäinen ja säteittäinen.
2. Kehämäinen ja aksiaalinen.
3. Aksiaalinen ja radiaalinen.
4. Kehä, säteittäinen, aksiaalinen.
- kiinnityskulma; - vaihteen alkukartion puolikulma.Millä kaavalla voidaan määrittää käytettävään vaihteeseen kohdistuva aksiaalivoima?
1) sellaista kaavaa ei ole;
- Mikä moduuli voidaan ottaa vakiona kartiovaihteessa?
1. T e
2. T T
3. Molemmat
- käyttää mitä moduuli laskea kartiohammaspyörän syvennysten ympyrän halkaisija?
1. T e
2. T T
3. T eJa T T
- Mikä on korkeus ( mm) hammaspäät, jos pyörässä on 45 hammasta (katso kuva);d e 1 = 51 mm, d e 2 = 225 mm?
1) 3,75
2) 11,25
3) 5,0
4) 6,25
5) Näiden tietojen perusteella on mahdotonta laskea
- Näytä minulle
![]()
- Mikä on viistepyörän laskentamoduuli taivutusta varten?
1. minä
2. m
3. Voi ollaminä jam
Mitkä voivat olla kierrevaihteiden voimansiirron akselit?
1. Rinnakkais.
2. Leikkaava.
3. Risti.
4. Ja yhdensuuntainen, ja leikkaava ja risteävä.
Mikä on hampaiden muoto hypoidivaihteistossa?
1. Suora.
3. Pyöreä.
4. Ja suora, ja vino ja pyöreä.
Miten johtavan ja ohjattavan elementin akselit ovat aaltolähetyksissä?
1. Koaksiaalinen.
2. Rinnakkais.
3. Leikkaa.
4. Risteytys.
Mitkä hampaat Novikov-vaihteella on?
2. Ruuvi (vino).
3. Pyöreä.
4. Mikä tahansa lueteltu.
Mitkä käyrät hahmottelevat hampaan työprofiilia Novikov-vaihteistolla varustetussa hammaspyörässä?
1. Involuutio.
2. Sykloidi.
3. Ympyrän kaaret.
4. Ympyrän suorien viivojen ja kaarien yhdistelmä.
Pienempi kaarevuussäde Novikov-linkissä verrattuna involuutioon:
1 Lisää;
2. vähemmän;
4. ja enemmän, ja vähemmän ja yhtä suuri.
Kuinka monta kertaa (noin) on Novikov-vaihteistolla varustettujen hammaspyörien kantokyky parannetuilla vaihteistomateriaaleilla ja kahdella vaihteistolinjalla suurempi kuin evoluutiovaihteiden?
1. 1,1 kertaa.
2. 1,4 kertaa.
3. 1,8 kertaa.
4. 2,2 kertaa.
Mitkä ovat hampaiden kaltevuuskulman todelliset arvot hammaspyörille, joissa on Novikov-vaihteisto?
1) 6 10° ;
2) 10 20° ;
3) 20 30° ;
4) 30 50° .
Novikov-vaihteiston vaihteiston kantavuutta voidaan lisätä:
1. vaihtaminen profiiliin, jossa on kaksi kytkentälinjaa;
2. lisäämällä keinotekoisesti ristikkäisten hammasparien määrää;
3. pienentämällä hampaiden kaltevuuskulmaa;
4. kasvava moduuli.
Mikä menetelmä on parempi rajoitetuilla aksiaalisilla mitoilla?
On tapana erottaa vaihdelaatikot:
1) yksivaiheinen;
2) kaksivaiheinen;
3) kolmivaiheinen;
4) monivaiheinen.
Mitä niistä käytetään laajimmin nykyaikaisessa tekniikassa?
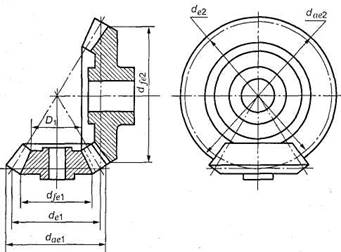
Mikä lähetys näkyy kuvassa?
1. rosoinen sisäisellä vaihteistolla
2. Planeettavaihteisto
3. Sahalaitainen aalto
- Mikä on kohteen nimi?h kuvan päällä?
1. Kuljetin
2. Satelliitit
- Näytä kuvassa vaihteiston vetoakseli
1) 1
2) 2
3) q
4) h
- Pelkästään kytkentää varten riittää laskea planeettapyörän hampaiden kosketuslujuus kuvan mukaan.
1. Ulkoinen
2. Sisäinen
3. Ulkoinen + sisäinen
- Tee planeettavaihteen satelliittien parametrit välityssuhteen arvosta
1. Vaikutus
2. Älä vaikuta
CJSC "NPO "Mechanic" valmistaa kartiohampaita, joissa on pyöreä hammas, jolla on seuraavat ominaisuudet:
Tarkkuusluokka - jopa 6 mukaan lukien;
Moduuli - jopa 12 mukaan lukien;
Halkaisija - jopa 1200 mm mukaan lukien.
Valmistamme pyöreähampaisia kartiohampaita kappaleina ja sarjatuotantoa. Tuotanto asiakkaan näytteiden ja luonnosten mukaan on mahdollista. Yksilöllinen lähestymistapa.
Pyöreähampaisten kartiohammaspyörien geometristen parametrien laskenta suoritetaan kohdan mukaisesti GOST 19326-73. Kartiohammaspyörän alkuperäinen ääriviiva on määritelty GOST 16202-81. Vaihteistomoduuli määritetään voimansiirron lujuuslaskelman yhteydessä ja valitaan sen mukaan GOST 9563-60.
 CJSC NPO Mekhanik valmistaa kartiohammaspyöriä, joissa on pyöreä hammas, jota seuraa ohjausajo. On mahdotonta saada kartiomaista paria, jossa on pyöreä hammas ja jossa on oikea pisteen sijainti ilman sisäänajoa.
CJSC NPO Mekhanik valmistaa kartiohammaspyöriä, joissa on pyöreä hammas, jota seuraa ohjausajo. On mahdotonta saada kartiomaista paria, jossa on pyöreä hammas ja jossa on oikea pisteen sijainti ilman sisäänajoa.
Kartiomaiset parit ilman riittävää hampaiden kosketuspinta-alaa kestävät jopa 10 kertaa vähemmän aikaa, aiheuttavat melua ja työn aikana tapahtuu asteittaista halkeilua ja hampaiden sirpaleiden muodostumista.
Kartiomaisten parien valmistus pyöreällä hampaalla suoritetaan suorittamalla peräkkäin seuraavat toimenpiteet:
- Hampaan leikkaaminen hammaspyörän leikkauskoneella;
- Pari asennetaan murtolaitteeseen, jossa simuloidaan työntekoa;
- Hampaat on merkitty magneettimaalilla;
- Pari pyörii kuormituksen alaisena, kosketuspiste paljastuu;
- Jos piste näyttää taulukon 1 mukaiselta (kohdat 2-5), niin osat palautetaan hammaspyöräleikkuriin, leikkausasetukset korjataan ja hammas leikataan.
pöytä 1
| Yleisimmät vaihtoehdot kosketuspaikan sijainnille ohjausajon jälkeen | ||||
| № | Hampaan puoli | Ota yhteyttä paikkakunnan sijaintiin | Mahdollisia haittoja | |
| kupera | Kovera | |||
| 1 |
 |
 |
Kontaktipaikan oikea sijainti | - |
| 2 |
 |
 |
Hampaan päällä | Halkeilevat tai kuluneet hampaiden kärjet |
| 3 |
 |
 |
Hampaan tyvessä | Vaihteiston jumiutuminen tai hampaiden pureminen |
| 4 |
 |
 |
Hampaan kapeassa osassa | Hampaiden ulkoosien murtuminen ja hankaus |
| 5 |
 |
 |
Hampaan leveimmässä osassa | Murtuminen ja hankaus sisäosat hampaat |
Suunniteltaessa kartiohampaita, joissa on pyöreä hammas, on otettava huomioon mahdollisuus leikata niitä koneeseen. Välillä 6..100 voit leikata pyörän, jolla on kuinka monta hammasta tahansa, ja välissä 100..200 vain pyörät, joissa on useita hampaita, jotka voidaan kertoa.
Hammaspyörän hampaiden vähimmäismäärä määritetään GOST 16202-81 ja riippuu pyörän hampaiden lukumäärästä ja hampaan kaltevuuskulmasta. Suositeltu hampaiden kaltevuuskulma on 0, 10, 15, 20, 25, 30, 35,40, 45°. Suositeltu hammaskulma on 35°.
Alkutiedot pyöreähampaisten kartiohammaspyörien geometristen parametrien laskemiseksi ovat:
- Ulkoinen kartioetäisyys Re, joka määritetään rakentavasti valitun aseman layoutin perusteella;
- Rengaspyörän leveys b, joka on alustavasti otettu yhtä suureksi kuin 0,3R ja määritetään voimansiirron lujuuslaskelmien suorittamisen jälkeen;
- pohjaetäisyys MUTTA, valittu rakentavasti;
- Ulkoisen piirin moduuli mte;
- Keskimääräinen normaalimoduuli m n;
- Pyörän ja vaihteiston hampaiden lukumäärä z1, z2;
- Keskimääräinen hampaiden kulma β ;
- Hammaslinjan suunta (oikea tai vasen).
Välityssuhteella, joka on suurempi kuin 2,5 GOST 19623-73 kartiohammaspyörä on suositeltavaa suorittaa alkuperäisen ääriviivan hampaan paksuuden positiivisella korjauskertoimella x r1, ja liitäntäpyörä, jolla on yhtä suuri negatiivinen alkuperäisen ääriviivan hampaan paksuuden korjauskerroin x r2 = -x r1. Jossa x r1 on suositeltavaa laskea seuraavien kaavojen mukaan:
0
15
29
40°
Leikkuupään halkaisijan valitsemiseksi GOST 19326-73, suunnittelija, kun suunnittelee pyöreähampaista kartiohammaspyörää, määrittää hampaiden aksiaalisen muodon arvon mukaan βn ja kerroin k o = R/d o, missä: R on keskimääräinen kartioetäisyys ja d o- leikkuupään halkaisija.
Pyöreähampaisen kartiohammaspyörän tärkeimmät geometriset parametrit ovat:
- Korjauskerroin x e;
- Hampaiden paksuuden muutoskerroin x r;
- Jakokartion kulma δ ;
- Hampaan pohjan linjan konvergenssikulma x f;
- Pysyvän hampaan jänne S ce;
- Korkeus jatkuvaan sointeeseen h ce;
- Keskipiirin moduuli m;
- Keskimääräinen nousuhalkaisija d;
- Masennuskartion kulma δ f;
- Ulkoisen hampaan korkeus h e;
- Ulkokehän hampaan paksuus Se;
- Ulkohalkaisija d e.
- Halkaisija d o;
- Etuhampaiden ero h e;
- Leikkurien kulman säde ρko.
Kun on suoritettu pyöreällä hampaalla varustetun kartiohammaspyörän geometristen parametrien laskelmat, lasketaan sen laatuindikaattorit, joihin kuuluvat: alileikkauksen puuttumisen tarkistaminen, hampaan normaalin paksuuden tarkistaminen kärkien pinnalla, hammastuksen asteen tarkistaminen hampaan paksuuden kaventuminen kärkien pinnalla, limityskertoimen tarkistaminen. Ne kaikki lasketaan kohdassa annettujen kaavojen mukaan GOST 19326-73.
Toleranssit geometriset parametrit pyöreähampaiset kartiohammaspyörät (kinemaattisen tarkkuuden standardit, toiminnan tasaisuus, kosketusnopeudet vaihteistossa) määritetään samalla tavalla kuin suorahampaiset hammaspyörät ja ne määrätään GOST 1758-81. Lähetyksen tarkkuus valitaan sen tarkoituksen mukaan (teho tai kinemaattinen). Vaihteiden tarkkuusasteesta riippumatta niiden hampaiden välinen sivuvälys lasketaan vaihteiston käyttöolosuhteiden ja sille asetettujen rajoitusten mukaan ja valitaan sitten GOST 1758-81.
Kartiohammaspyörien työpiirustukset laaditaan mukaisesti GOST 2.405-75.
Pyöreähampaisten kartiohammaspyörien lujuuslaskelmat suoritetaan samalla tavalla kuin suorahampaisten kartiohammaspyörien laskenta.
Kartiohammaspyörien hampaat, riippuen niiden normaaliosien koon muutoksesta pituudella, on tehty kolmen aksiaalisen muodon muodossa. Taulukko 2.
taulukko 2
| Aksiaalihammasmuotoiset kartiohammaspyörät | |||
| Aksiaalinen muoto 1 | Aksiaalinen muoto 2 | Aksiaalinen muoto 3 | |
 |
 |
 |
 |
Aksiaalinen muoto 1 - suhteellisesti laskevat hampaat. Jakavien kartioiden ja onteloiden huiput osuvat kohdakkain, hampaan varren korkeus on verrannollinen kartioetäisyyteen. Käytetään suorille hampaille.
Aksiaalinen muoto 2 - normaalisti kapenevat hampaat. Ontelokartion yläosa on sijoitettu siten, että pyörän ontelon pohjan leveys on vakio ja hampaan paksuus jakokartiossa on verrannollinen kartioetäisyyteen. Tämän muodon ansiosta yksi työkalu voi käsitellä hampaiden molemmat puolet kerralla, mikä lisää tuottavuutta. Se on tärkein pyöreähampaisille pyörille, erityisesti massatuotannossa.
Aksiaalinen muoto 3 - yhtä korkeat hampaat. Jakavien, syvennysten ja huippujen kartioiden generaattorit ovat yhdensuuntaisia. Hampaan korkeus on vakio koko pituudeltaan. Niitä käytetään hammaspyörille, joiden akselien välinen kulma on alle 40 ° ja joissa on pyöreät hampaat √(z 1 2 + z 2 2) ≥ 60.
Pyöreähampaisten kartiohammaspyörien valmistuksessa ota yhteyttä myyntiin puhelimitse.
Moduulit. Normaalimoduuli otetaan lasketuksi moduuliksi m n kruunun leveyden keskellä.
Laskennan lähtökohtana sen sijaan m n ulkoinen piirimoduuli voidaan hyväksyä mte. Joten hammaspyörille, joiden parametrit ovat GOST 12289-76:n mukaiset ja joissa pyörien ulkohalkaisijat on standardoitu ( d e2), määrittele aluksi ulompi piirimoduuli
m te \u003d d e2 / z 2, joka otetaan aloitusarvona jatkolaskennassa.
klo m n < 2 исходным для расчета принимают только средний нормальный модуль.
Moduulit m n on suositeltavaa asentaa GOST 9563-60:n mukaan, ne vastaavat GOST 11902-77:n mukaisten hammaspyörien leikkuupäiden terien eroja (taulukko 74).
74. Avioerot W2 hammaspyörän leikkuupäiden leikkurit GOST 11902-77 mukaisesti ja niitä vastaavat arvot
hammaspyörän hampaan lasketun paksuuden muutoskertoimet x τ 1 keskitasolla
normaalit moduulit m n GOST 9563-60 mukaan
|
Keskimääräinen normaalimoduuli m n, |
x τ 1 |
x τ 1 |
x τ 1 |
||||
|
*δhf- korjaus hampaan pedicleen korkeuteen syötetään vain, kun
x τ 1 = 0 ja kaksipuolinen pyörän käsittely. |
|||||||
Hammaslinjan kaltevuuskulma ja suunta.
Arvioitu helix-kulma ß n voi olla välillä 0-45°. On suositeltavaa käyttää jotakin sarjan arvoista:
0; 10; 15; kaksikymmentä; 25; kolmekymmentä; 35; 40; 45°.
Suositeltu kaltevuuskulma ß n= 35°. klo z1 6 - 17 suositeltua arvoa on esitetty taulukossa. 73.
Injektio ß n on suositeltavaa määrittää sellainen, että aksiaalisen limityksen kerroin ε ß
oli vähintään 1,25;
kun voimansiirron maksimaalista tasaisuutta vaaditaan, suositellaan ε ß
≥ 1,6 (kuva 32).
Kun määrität kulmaa ß n on myös otettava huomioon, että sen kasvaessa tukien ja akseleiden kuormitukset kasvavat.
Taulukossa. Kuva 75 esittää kaavat aksiaalisten ja säteittäisten voimien suuruuden ja suunnan määrittämiseksi pyöreähampaisten kartiohammaspyörien kytkeytymisessä, ja kuviossa 11 on esitetty. Kuva 33 on kaavio aksiaalivoiman suuruuden ja suunnan määrittämiseksi ortogonaalisessa kartiohammaspyörässä alkuperäisen ääriviivan profiilikulmassa a n= 20°.
Jos hammaslinjojen suunnat ovat yhteneväiset pyörimissuunnan kanssa, katsottuna alivaihteen veto kartiohammaspyörän ja ylivaihteen käytetyn kartiohammaspyörän nousukartioiden yläpuolelta, niihin kohdistuvat aksiaaliset voimat suunnataan pikikartioiden huiput.
Kiinnityspyörillä on vastakkaiset hammaslinjat.
Suunniteltaessa kartiohampaita, joissa on hampaan I aksiaalinen muoto, joissakin tapauksissa hampaiden laskettu kaltevuuskulma määrätään ottaen huomioon jyrsinten lukumäärä
Riisi. 32. Kaavio aksiaalisen limityskertoimen määrittämiseksi
Esimerkki. Annettu: b= 30 mm, m n= 4 mm, ß n= 40°. Aikataulun mukaan he löytävät osoitteesta b / m n = 30/4 = 7,5; ε ß = 1,54.
75. Kaavat vaikuttavien voimien määrittämiseksi
|
Ajovaihde |
ajettava vaihde |
|
|
Kaupunginosa |
Missä T1 Ja T2- hetket vaihteessa ja pyörässä |
|
|
Säteittäinen |
||
|
Huomautuksia: 1. Ylemmat merkit kaavoissa on annettu tapaukselle, jossa tarkastelun pyörimissuunta |
||
Riisi. 33. Aksiaalivoimat kartiohammaspyörien kytkeytymisessä pyöreällä
hampaat a n= 20°, Σ = 90°
Kaareille A
Käyrät B
Esimerkki. Annettu: δ1= 18°; δ
2 = 72°; ß n= 35°.
hammaspyörä: kaltevuussuunta - oikea, pyörimissuunta - oikea;
pyörä: vasen, pyörimissuunta - vasen.
Nomogrammin mukaan määritämme F x1 = 0,79 F t;
F x2 = 0,19 F t ,
käytetään hammaspyörien leikkauksessa. Tätä varten tarvittava määrä etuhampaita määritetään alustavasti kaavalla
ja pyöristää arvoihin N GOST 11902-77 mukaan. Yllä olevassa kaavassa ß "n- suunniteltavan vaihteen kaltevuuskulman alustava arvo.
Aseta lopuksi hampaan laskettu kaltevuuskulma ß n kaavan mukaan
alkuperäisellä ääriviivalla GOST 16202-81:n mukaan.
Lähteen ääriviivat. Alla pyöreähampaisten kartiohammaspyörien alkuperäinen muoto(Kuva 35) tarkoittavat ehdollisen kiskon hampaiden ääriviivaa, jonka profiili ja hampaiden korkeusmitat ovat samat litteän alkupyörän hampaiden samojen elementtien kanssa keskimääräisessä normaalileikkauksessa; hampaiden jako ja paksuus otetaan vastaavasti yhtä suureksi kuin tasaisen alkupyörän kehän nousu ja puolet kehän noususta hammaspyörän leveyden keskellä, kerrottuna linjan keskimääräisen kaltevuuskulman kosinilla. litteän alkupyörän hampaat; c = p f= 0,25m n.
Teknisesti perustelluissa tapauksissa jakohammaspaksuuksien epätasa-arvo on sallittu s n1 Ja s n2 alkuääriviivojen parissa muuttaen sisääntulon syvyyttä h w ,
säteittäinen välys alkaen ja säde p f(alkaen 0,15 m n ja 0,35 asti m n) ja vastaavasti rajan korkeus hl, sekä muun siirtymäkäyrän kuin ympyräkaaren käyttö, jos nämä muutokset eivät riko oikeaa kytkentää eivätkä estä vakiotyökalun käyttöä.
Alkuperäisen ääriviivan profiilimuutoksia saa käyttää.
Kartiohammaspyörät pyöreillä hampailla (keskimääräinen normaalimoduuli m n
1 mm tai enemmän) on suoritettava alkuperäisen ääriviivan parametreilla ja kertoimilla standardin GOST 16202-81 mukaisesti:
pääprofiilikulma a n= 20°;
pään korkeuskerroin h*a = 1;
jalkojen korkeustekijä h*f= 1,25;
raja korkeuskerroin h*l = 2,08;
siirtymäkäyrän kaarevuussäteen kerroin, joka on ympyrän kaari, p*f= 0,25;
Riisi. 35. Ensimmäinen ääriviiva standardin GOST 16202-81 mukaan
sisääntulosyvyyskerroin alkuääriviivojen parissa h*w = 2;
säteittäisen välyksen kerroin alkuääriviivojen parissa c* = 0,25;
profiili rajakorkeuden sisällä on suora.
Huomautus. Jos muita viitteitä ei ole, niin missä tahansa hammasprofiili mainitaan, se tarkoittaa profiilia normaalissa mallissa
-osio.
Hampaiden aksiaalisen muodon ja hammaspyörän pään nimellishalkaisijan valinta.
1.
Taulukossa. 76 esittää kartiohammaspyörien parametrialueet, jotka määrittävät hampaiden aksiaalimuotojen mahdolliset käyttöalueet
I, II ja III, joita käytetään eniten. Hampaan I aksiaalinen muoto on esitetty kuvassa. 28, hampaan II ja III aksiaaliset muodot - kuvassa 39 ja 40.
GOST 16202-81:n mukaisella alkuperäisellä ääriviivalla ja lasketuilla hampaiden kaltevuuskulmilla ß n> 15° näiden alueiden rajaus riippuen
ja ß n asetettu kuvan mukaan. 36.
Piirretyillä viivoilla varjostettu alue vastaa arvoja k o ja ß n, jossa hampaiden I ja II aksiaaliset muodot ovat käytännössä samat. Kaareva viiva, joka jakaa aksiaalihammasmuodon III hammaspyörien suositellun käyttöalueen lähes kahteen yhtä suureen osaan, vastaa arvoja
jossa yhtä korkeiden hampaiden kapeneminen on poissuljettu ja ne saavat optimaalisen muodon.
76. Kartiovaihteiden pääparametrit
pyöreät hampaat määrittävät alueet
erilaisten aksiaalisten hammasmuotojen soveltaminen
|
Parametrit |
Merkintä |
Aksiaalinen hampaan muoto |
||
|
Keskimääräinen normaali moduuli, mm |
0,4-25 |
|||
|
Keskimääräinen kartioetäisyys, mm |
60-650 |
60-700 |
75-750 |
|
|
Keskimääräisen kartioetäisyyden suhde vaihteiston nimellishalkaisijaan |
k o |
β:lle n> 15° - kuvassa 2 esitettyjen arvojen sisällä. 36, kohdassa β n≤ 15° - 0,40-0,65 aksiaalisille hammasmuodoille I ja II |
||
|
Hampaiden keskimääräinen kaltevuuskulma |
β n |
0 - 45° |
25 - 45° |
|
| Ottaen huomioon kuvan 1 mukaisen litteän pyörän hampaiden lukumäärän. 37 | ||||
|
Litteän pyörän hampaiden lukumäärä |
z kanssa |
|||
| Kun otetaan huomioon hampaan kaltevuuskulma kuvan 1 mukaisesti. 37 | ||||
Aksiaalisen hammasmuodon III kanssa on suositeltavaa valmistaa kartiohammaspyörät kohtisuorasta hammaspyörästä, joiden keskimääräinen kartioetäisyys on suurempi kuin 0,7 tämän hammaspyöräkoneen suurimmasta sallitusta keskimääräisestä kartioetäisyydestä.
Riisi. 36. Hampaiden I, II, III aksiaalisten muotojen järkevän käytön alueet (alkukäyrä GOST 16202-81:n mukaan):
Hammaspyörät β-hammaskulmalla n 0 - 15°, on edullista suunnitella hampaan II aksiaalisen muodon mukaan ottaen huomioon kuvan 1 mukaiset litteän pyörän hampaiden lukumäärän rajoitukset. 37.
2. Hammaspyörän pään nimellishalkaisijan valinta pyöreähampaisten kartiohammaspyörien leikkaamiseksi on suositeltavaa tehdä taulukon mukaan. 77, joka on laadittu kuvan 7 mukaisesti. 36.
Riisi. 37. Aksiaalihammasmuotojen I, II ja III käyttöalueet riippuenz kanssa ja β n.
Riisi. 38. Kaavio viisteen toissijaisen leikkauksen puuttumisen tarkistamiseksi
hammaspyörät pyöreillä hampailla
Esimerkki. Annettu: δ
= 75°, βn= 35°, z alkaen= 47, ko = 0,47. Koska annetuille parametreille kuvion 1 ordinaatta. Z8, mutta ordinaattisempi kuvassa. 38, b, jälkileikkaus viimeistelyn aikana on jätetty pois: samoin kuvan 1 ordinaattien vertailusta. 38, mutta ja 38, b Varmista, että toissijaisen leikkaamisen vaaraa ei ole olemassa, kun vaihteistoa rouhitaan
Jos ulkoinen piirimoduuli otetaan lähteeksi siirron laskennassa m te, sitten hammaspyörän leikkuupään valinnassa tarvittavan keskimääräisen kartiomaisen etäisyyden arvo määritetään kaavalla
R ≈ 0,42m te z c.
Kun suunnitellaan pienimoduulivaihteita ( m n < 2) с осевой формой зуба III диаметр зуборезной головки и параметры передачи следует подбирать такими, чтобы соблюдалось равенство
d o = m n z c tgβn.
Samalla halkaisija d o valita taulukon mukaan. 77 sarjasta hampaan aksiaalista muotoa varten II.
Jos datalla R, h, b Ja m n halkaisijaltaan erilaisia leikkuupäitä voidaan valita d o, niin keskiarvoinen vaihdepää on parempi käytettäväksi d o.
Pyörille, joiden hammaslinjat ovat oikeassa suunnassa jakokartion kulmassa δ
≥ 50° ja suhteet
on tarpeen tarkistaa hammaspyörän katkaisupään halkaisijan valinnan oikeellisuus toissijaisen leikkauksen puuttumisen varalta kuvassa 1 esitettyjen kaavioiden mukaisesti. 38.
Jos kuvan ordinaat 38, mutta annettu k o Ja βn suurempi kuin arvojen määräämä ordinaatta δ
Ja z alkaen kuvassa Kuvassa 38b tämä osoittaa, että toissijaisen leikkauksen vaaraa ei ole, kun kartiohammaspyörää viimeistellään sisäänajomenetelmällä. Samoin vertaamalla ordinaatteja
riisi. 38, a ja 38, b varmista, että toissijainen leikkaus puuttuu kartiohammaspyörän karkean leikkaamisen aikana koko työkappaleesta juoksumenetelmällä.
77. Vaihteen pään nimellishalkaisijan valinta
Mitat, mm
|
Arvioitu kaltevuuskulma |
Keskimääräiset kartioetäisyysrajat R | Leikkuupään nimellinen halkaisija d o | Ulkoisen hampaan korkeus h e | Rengaspyörän leveys b | Arvioitu nimellinen moduuli m n | |
| hyväksyttäväksi | ||||||
| Aksiaalinen hampaan muoto I | ||||||
|
0-15 |
36-58 |
|||||
|
0-15 |
40-65 |
|||||
|
0-15 |
50-80 |
|||||
|
0-15 |
60-100 |
|||||
|
0-15 |
65-105 |
|||||
|
0-15 |
75-120 |
|||||
|
0-15 |
80-130 |
|||||
|
0-15 |
90-150 |
|||||
|
0-15 |
100-160 |
|||||
|
0-15 |
120-200 |
|||||
|
0-15 |
120-200 |
|||||
|
0-15 |
160-250 |
|||||
|
0-15 |
180-300 |
|||||
|
0-15 |
200-320 |
|||||
|
0-15 |
250-400 |
|||||
|
0-15 |
320-520 |
|||||
| 15-29 St. 29 » 40 |
400-650 450-600 |
- | 1000 | 70 | 100-200 | 6-25 |
| Aksiaalinen hampaan muoto II | ||||||
| 0-15 St. 15 » 45 |
13-21 | - 10-22 |
32 | 4 | 2,5-8 | 1,25 |
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
50 ja |
|||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
0-15 |
||||||
|
15-29 |
400-700 |
|||||
| Aksiaalinen hampaan muoto III | ||||||
|
30 |
75*-90 |
|||||
|
30 |
85*-100 |
|||||
|
30 |
105*-125 |
|||||
|
30 |
130*-150 |
|||||
|
30 |
135*-160 |
|||||
|
30 |
160*-190 |
|||||
|
30 |
170*-200 |
|||||
|
30 |
190*-230 |
|||||
|
30 |
210*-250 |
|||||
|
30 |
260*-305 |
|||||
|
30 |
270*-315 |
|||||
|
30 |
340*-400 |
|||||
|
30 |
390*-460 |
|||||
|
30 |
420*-500 |
|||||
|
30 |
530*-630 |
|||||
|
30 |
680*-800 |
|||||
|
Huomautuksia: 1. Jos arvo R ylittää "*":lla merkityn arvon ja jakokartion kulman 5. Taulukko koostuu hammaspyörän käsittelytilasta kaksisuuntaisella tai pyörivällä menetelmällä. |
||||||
78. Ortogonaalisten kartiohammaspyörien siirtymäkertoimet
pyöreillä hampailla alkuperäisellä ääriviivalla GOST 16202-81:n mukaan
| Hampaiden lukumäärä vaihteet z 1 |
Offset Factor Values x n1 klo välityssuhde lähetys u | |||||||||||
| 1 | 1,2 | 1,25 | 1,4 | 1,6 | 1,8 | 2,0 | 2,5 | 3,15 | 4,0 | 5,0 | 6,3 ja korkeampi |
|
| Arvioitu hampaiden kulma βn 0 - 15° | ||||||||||||
| 12 13 14 15 16 18 20 25 30 40 |
- - - - 0,00 0,00 0,00 0,00 0,00 0,00 |
- - - - 0,10 0,09 0,08 0,07 0,06 0,05 |
- - - 0,18 0,17 0,15 0,14 0,13 0,11 0,09 |
- - 0,27 0,25 0,24 0,22 0,20 0,18 0,15 0,12 |
- - 0,34 0,31 0,30 0,28 0,26 0,23 0,19 0,15 |
- - 0,38 0,36 0,35 0,33 0,30 0,26 0,22 0,18 |
- 0,44 0,42 0,40 0,38 0,36 0,34 0,29 0,25 0,20 |
0,50 0,48 0,47 0,45 0,43 0,40 0,37 0,33 0,28 0,22 |
0,53 0,52 0,50 0,48 0,46 0,43 0,40 0,36 0,31 0,24 |
0,56 0,54 0,52 0,50 0,48 0,45 0,42 0,38 0,33 0,26 |
0,57 0,55 0,53 0,51 0,49 0,46 0,43 0,39 0,34 0,27 |
0,58 0,56 0,54 0,52 0,50 0,47 0,44 0,40 0,35 0,28 |
| Arvioitu hampaiden kulma βn St. 15-29° | ||||||||||||
| 10(βn≥ 28°) 11(βn≥ 25°) 12(βn≥ 20°) 13 14 15 16 17 18 20 25 30 40 |
- |
- Suunnittelijan käsikirja - Kaikki mitä suunnittelija tarvitsee! ©2008-2017 |
||||||||||
